

Теория управления с обратной связью. Линейные системы.
В любой системе, если существует линейная связь между двумя переменными, то говорят, что она является линейной системы.
Пример: уравнение y=Kx (1) представляет собой систему линейных уровнений. Это означает, что если K – константа то отношение между двумя переменными x и у находится в линейной зависимости.
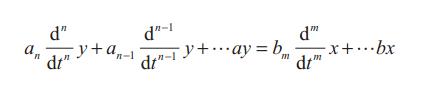 (2)
(2)
где: n и m – порядок дефиринциальных уровнений, an bn – константы, и n>m
Любая другая форма уровнений называется нелинейной системой.
Пример 1.
Эквивалентная схема DC серводвигателя представленна ниже
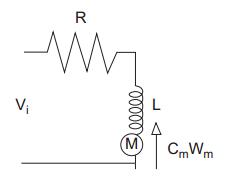
Уровнение для этой схемы можно представить как
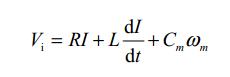 (3)
(3)
где: Vi, I, ωm – входное напряжение, ток и угловая скорость. R и L сопротивление и индуктивность. Это уровнение демонстрирует нам линейную систему, где ωm выходня переменная , а Vi представляет собой входное напряжение.
Для DC серво мотора мы можем записать
 (4)
(4)
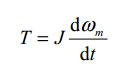 (5)
(5)
где: Kt, J крутящий момент и момент инерции ротора
Исключим T для уровнения (4) и (5) и подставим для I в уровнении (3) и получим
 (6)
(6)
Уровнение представляет собой линейную дифференциальную систему, Vi – называется входная переменная, ωm – называется выходной переменной. Уравнение (6) может быть решено с для ωm с точки зрения входной переменной. В таком случае мв неучитываем внешний момент воздействующий на мотор. Если рассматривать внешний крутящий момент , то придется оперировать двумя входными переменными и одной выходной.